
机械手控制系统是伴随着机械手(机器人)的发展而进步的。机械手是在早期出现的古代机器人基础上发展起来的,机械手研究始于20世纪中期,随着计算机和自动化技术的发展,特别是1946年台数字电子计算机问世以来,计算机取得了惊人的进步,向高速度、大容量、低价格的方向发展。同时,大批量生产的迫切需求推动了自动化技术的进展,又为机器人和机械手控制系统的开发奠定了基础。另一方面,核能技术的研究要求某些操作机械代替人处理放射性物质。在这一需求背景下,美国于1947年开发了遥控机械手控制系统和遥控机械手,1948年又开发了机械式的主从机械手控制系统和机械手。

随着我国自动化技术的提高, 人机界面产品越来越受到人们的关注。作为新一代高科技人机界面产品的触摸屏是适合在恶劣的工业环境中作为一种在操作人员和机器设备之间作双向沟通的新型人机界面[1], 是可编程序控制器PLC (Programmable Logical Controller) 的佳搭档[2]。将触摸屏用于PLC 控制系统中已经成为工业控制领域的发展方向。伴随着工业技术的发展, PLC 也已经成为工科院校机电类专业的主要课程。但学校教学中PLC 的被控工业对象往往会受到被控对象的种类、价格、体积和维护等多种条件的限制, 容易造成实践项目种类局限和扩展性差等现象。随着触摸屏监控功能越来越强大, 使得触摸屏取代传统教学中的控制面板和实物演示的功能成为可能。本文提出了将触摸屏应用于以机械手为被控对象的PLC 控制系统中, 此方法的使用一方面减少了PLC 所使用的I/O 点数, 另一方面触摸屏具有的图形化和交互式的组态工作界面更易于扩展系统的功能, 丰富PLC 的实践教学。
1 机械手控制系统
1.1 系统的控制要求

图1 机械手
搬运机械手见图1, 其任务为将左工位上加工好的工件送到右工位, 已知待搬运工件在机械手初始位置正下方, 对此机械手有如下控制要求:
(1)机械手在初始位置, 按下启动按钮后, 机械手下移至工件处→夹紧工件→携工件上升→右移至下一个工位上方→下移至指定位置→放下工件→上移→左移, 回到原始位置。此过程反复循环执行。
(2)机械手运动过程中, 如果按下停止按钮, 机械手并不马上停止, 也不主动复位, 而是继续工作, 直到完成本周期操作, 回到原始位置, 之后停止, 不再循环。如果按下急停按钮, 机械手停在当前位置,解除急停后, 按下复位按钮, 机械手复位, 停在初始位置等待重新开始操作。
1.2 系统硬件配置
(1) 控制系统的选型。目前,在国内市场上有国外引进的和国内组装、开发的多种PLC。故PLC 系列标准不一, 功能参差不齐, 价格悬殊, 考虑到PLC 的性价比、适应负载的能力和学校教学的适应性等因素, 选用PACSystems RX3i 系列PLC 产品和QP Control 6″ TFT(IC754Cxx06Cxx) 触摸屏。控制软件采用GE 公司的集成开发环境Proficy Machine Edition 6.0, 该软件在一个开发环境中集成Proficy View(触摸屏)、Logic Developer-PLC(PLC/PAC 的编程)、Logic Developer-PC (基于PC 控制的编程与运行调试) 和Proficy Motion Developer (运动控制编程) 编程界面, 编程界面的切换只需点击菜单栏Window 的下拉菜单中的Apply Themes 即可实现。Proficy ME 软件平台在多种硬件上具有很好的可移植性[3]。
(2) PLC 系统硬件组成。PLC 系统的硬件结构主要包括: RX3i 可编程控制器CPU 模块(IC695CPU310)、12 插槽底板(IC695CHS012)、直流24 伏单幅宽电源模块(IC695PSD040)、以太网通信模块(IC695ETM001)、32 点控制指令输入模块(IC694MDL655)、32 点控制指令输出模块(IC694MDL754)[4]。其硬件结构组成见图2。
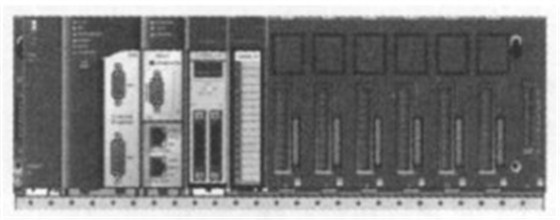
图2 控制系统硬件结构图
1.3 系统软件设计
(1) 系统的地址分配。根据机械手的控制要求可知, 本控制系统共有4 个按钮输入信号, 分别执行启动、停止、急停和复位功能; 位置检测传感器需要4 个, 分别执行左限位、上限位、下限位和右限位的功能; 输出信号有5 个, 分别执行机械手的下移、夹紧、上升、右移和左移的功能。系统的I / O 分配见表1。

表1 控制系统的I/O 分配表
(2) 触摸屏人机界面的设计由以下两部分组成。部分:监控界面设计。该系统的触摸屏选用IC754VSL12CTD, 分辨率为800×600 像素。触摸屏的操作系统是微软Windows CE.NETFM, 它保存在16MB 闪存中, 在使用时被拷贝到动态内存中, 上电或者重新启动触摸屏后, 操作系统自动开始运行。由于GE 公司将触摸屏Quick panel View 编程软件与Proficy MachineEdition 软件相融合, 所有接口产品均可以采用同一个软件包来进行软件编制, 该软件包括有组态、部件、绘图和编制脚本程序等丰富的工具, 因此可以在较短时间内完成复杂的监控画面开发。完成整体画面制作和脚本程序的编制后, 通过触摸屏上一个自适应、半双工或全双工的网卡端口, 将在Proficy Machine Edition 中编好的软件用网线通过PLC 的以太网通讯模块下载到触摸屏中,同时实现与PLC 通信和人机交互操作。本系统触摸屏监控画面如图3 所示。
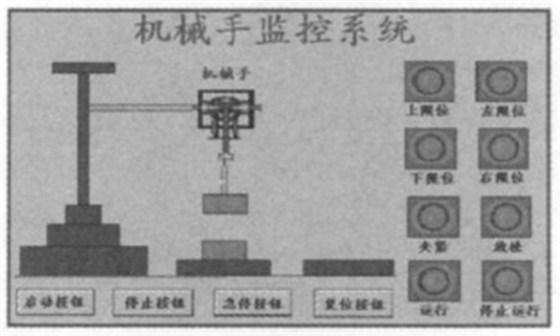
图3 机械手控制系统的触摸屏监控界面
监控画面中画出了机械手的简单示意图, 并设计了四个输入按钮、四个限位开关的指示灯、两个夹紧和放松的指示灯, 机械手的上、下、左、右动作可以从画面上直观看到。画面中还设计了两个状态指示灯, 代表机械手运行和停止运行的状态, 当机械手处于运行和停止运行的状态时, 它们将进行相应的指示。部分: 变量的动画连接。本控制系统中触摸屏监控画面中相对应的按钮、指示灯和机械手的运动等与PLC 中的变量建立连接, 以便能使监控画面按照动作要求动起来。触摸屏上的按钮和限位开关的指示灯是通过中间继电器与梯形图程序建立连接, 机械手的上、下、左、右四个动作变量与输出继电器进行连接和相应的脚本程序实现动画功能。按钮的动画连接(以启动按钮为例) 需进行Touch 和Color 配置; 指示灯的动画连接需进行Color 颜色配置和脚本程序实现; 机械手臂的移动需进行Size、Position 配置和脚本程序实现。配置方法以启动按钮触摸动态配置为例,
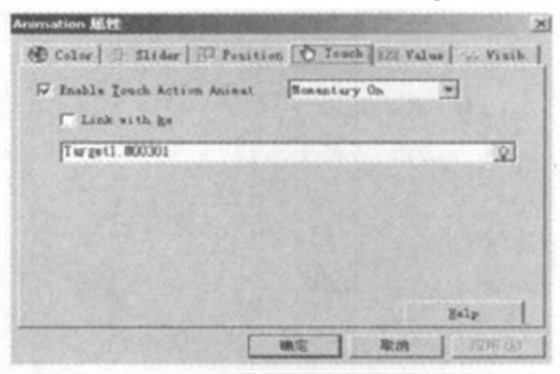
图4 启动按钮触摸动态配置
见图4。
机械手臂的移动动画和位置传感器指示灯的状态变化的脚本程序(以机械手臂下移和下限位传感器指示灯为例) 如下:
IF Targetl.Q00001>0
xiajiang:=xiajiang+10
ENDIF
IF xiajiang>50
Targetl.M00007:=1
ENDIF
IF Targetl.Q00003>0
Targetl.M00007:=0
ENDIF
(3) PLC 软件程序设计。控制系统软件采用ProficyME 6.0 编程, Proficy ME 6.0 软件是在Windows 操作系统下对GE PLC 编程的可视化开发工具, 利用Logic Developer—PLC 可以在个人计算机上进行控制程序的开发, 并且通过以太网或串行口下载到PLC 中。
2 控制系统的软、硬件联调
通过Proficy Machine Edition 编程界面的连接(Online/Offline) 建立PC 机与PAC 的连接并下载, 并将CPU310 上的拨钮开关打到RUN OUTPUT DISABLE 位置, 观察程序输出的运行结果是否正确, 如果软件程序设计正确, 将拨钮开关打到RUN I/O ENABLE。右击触摸屏目标对象, 按左键选择下拉菜单中的下载并运行, 将触摸屏运行画面及脚本程序下载到触摸屏中, 点击画面上的输入按钮, 修改程序及监控画面直到触摸屏画面中观察机械手的运行过程满足控制系统的控制要求为止。
3 结束语
该设计提出将触摸屏应用到机械手的PLC 控制系统中。对整个控制系统的软、硬件设计和系统的调试可以实现PLC 控制触摸屏画面的机械手, 真实展现机械手作为控制系统中被控对象的工作过程。实践应用证实, 该系统设计方案合理, 仿真效果逼真, 有助于提高学生在工业控制中PLC 编程能力和达到丰富学生工程实践经验的目的, 可在高校教学中推广, 具有很强的实用性。
欢迎来到信利来电子科技公司官网,如果您在购买过程中遇到问题,或对我们的工作有任何的建议,您可通过以下任一种方式联系我们。
本公司产品包括电阻式触摸屏、P+G电容式触摸屏,G+G电容式触摸屏,G+F+F电容式触摸屏、触摸屏控制卡。产品广泛应用于平板电脑、GPS导航仪、手机、工业控制、移动终端、教育电子、家用电器等行业。
 7寸串口屏 XN-320
7寸串口屏 XN-320 19寸电容触摸屏 -XLL-800190
19寸电容触摸屏 -XLL-800190 15寸电容触摸屏 XLL-800150
15寸电容触摸屏 XLL-800150 21.5寸白色电容屏
21.5寸白色电容屏